Process
Moodboard/storyboard - Cad - rigging bones - animation - texturing - lighting - rendering - compositing - editing

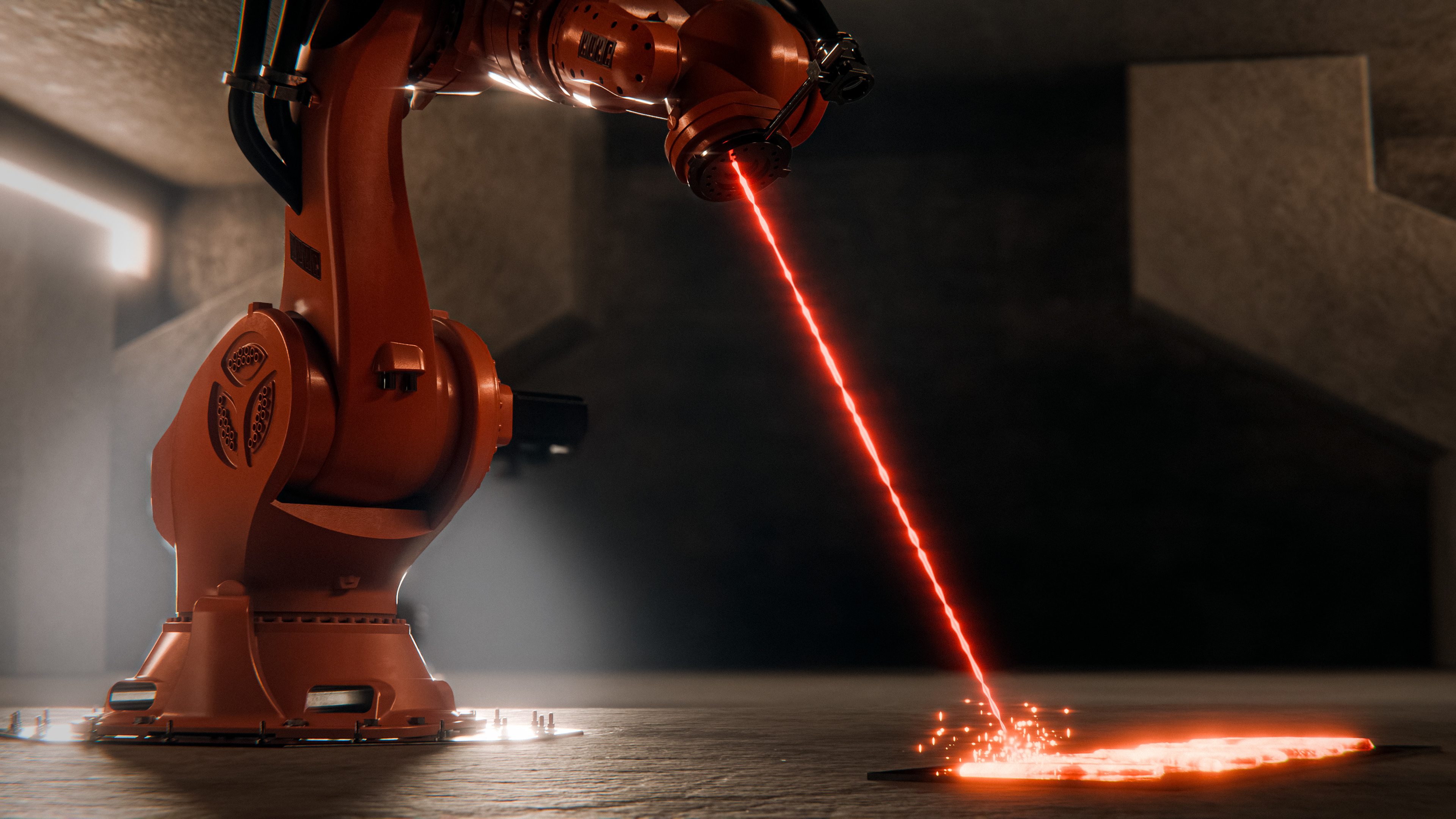
In this project, I created a technology visualization of KUKA's industrial robot, the KR 1000 Titan.
I was fascinated by the idea of making the robotic arm "dance," which gave me the opportunity to explore the principles of inverse kinematics and rigging.
The main focus of the project was the animation, as well as visually breaking apart a section of the robot to highlight its internal structure and function.
The main focus of the project was the animation, as well as visually breaking apart a section of the robot to highlight its internal structure and function.
I took a lot of inspiration from KUKA’s videos, where they programmed the robot to dance with real people or play instruments. I also explored different shots for the breaking-apart animation that I found interesting.

For this project, I used a model of the robot from CGTrader by Duong170 and a moddel of an planetary gearbox from Grab Cad by Yash Darji.
First, I refined the model in Fusion 360 by adding fillets, modeling bolts, and engraving the name to give it more detail.
One of the first things I did in Blender was to set up the bone structure and get the inverse kinematics working the way I wanted.
It took a lot of tweaking to get everything working together so the robot arm would move with the correct constraints - just like a real robot - and the hose would follow along when the robot moved.
It took a lot of tweaking to get everything working together so the robot arm would move with the correct constraints - just like a real robot - and the hose would follow along when the robot moved.
I created the wireframe effect using Blender’s shader nodes.I used the Wireframe node in combination with masks as color ramps and gradient textures. I controlled the movement of the wire effect using an Empty linked to the Texture Coordinate node by setting the mapping method to Object and selecting the Empty as the reference. This allowed me to animate the wire pattern by simply moving the Empty in the 3D space.
The animation was also created in Blender and post-processed using Blender’s compositor. I assembled all the shots in a single file and used camera markers to switch between scenes in the timeline. I also animated the lights to snap into place automatically for each scene. This workflow allowed me to synchronize the animations directly with the music inside Blender.
This is a fictional project with no affiliation to KUKA robotics.